Results
The adaptive traffic light controller can be seen to perform better than the non-adaptive controllers (1 and 2 second alternating intervals) in terms of decreased traveling times for all systems of low, medium and high traffic.
Visualizations
Below you can see a scenario of a single car in a system using both a 2-second non-adaptive controller (left) and the adaptive control (right). As you can see the adaptive controller, when used in a system of 1 car, will change the lights dynamically for the car when it approaches the intersection. The non-adaptive controller simply just alternates all the lights every 2 time-steps. This causes the car to get stuck at the intersection on the bottom right. Comparing the two scenarios, one can easily see that the adaptive controller allows for a smaller traveling time, due to never getting stuck at a red light (all lights turn green when it approaches).
Non-Adaptive (2 sec) Traffic Light Control
for a 1 Car System
|
Adaptive Traffic Light Control for a 1 Car System
|
Below is a scenario of 10 cars in a system using both a 2-second non-adaptive controller (left) and the adaptive control (right). The same methodology can be applied to this smaller-sized less-saturated system. One can see that using the adaptive controller, the cars can move quicker through the system than using the non-adaptive control.
Adaptive vs. Non-Adaptive Controllers for a system of 10 cars
Graphs
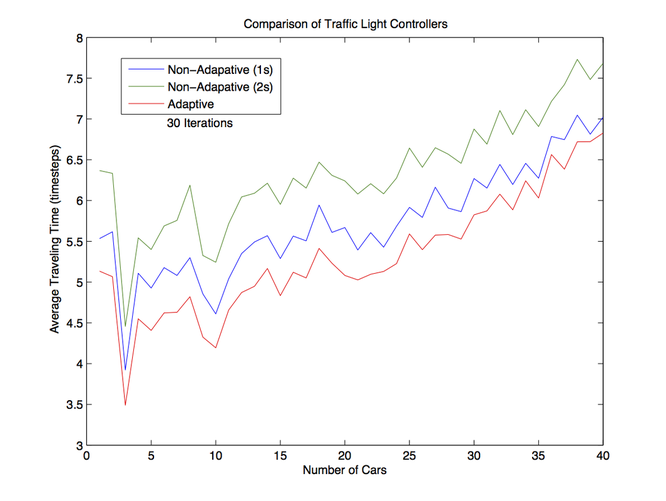
Below, there are two graphs both comparing the average traveling times of three traffic light controllers of systems with varying number of cars. The first graph is of systems from 1 to 20 cars, with 50 iteration of each instance, and the second is of systems from 1 to 40 cars, with 30 iterations each. Each of these graphs show that the average traveling times for each system, independent of the number of cars in the system, the adaptive traffic light controller produces the least traveling time of all three controllers. Of the non-adaptive controllers, the 1-second alternating traffic light produced a smaller traveling time than that of the 2-second alternating light.
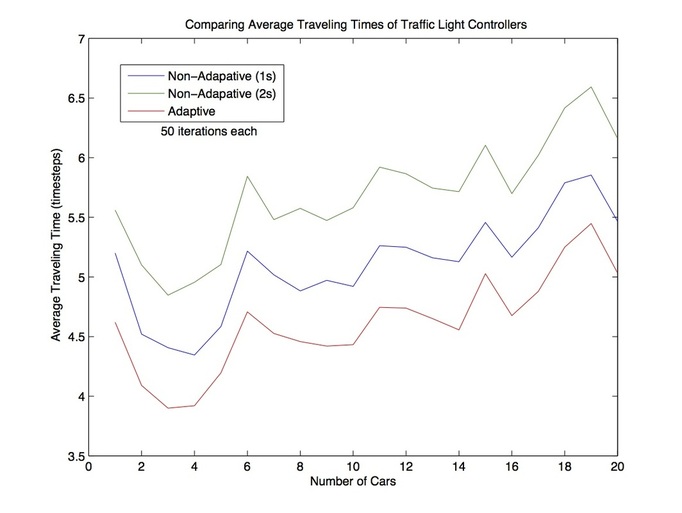
Comparing Average Traveling Times
By looking at the second graph, one can see that the adaptive controller outperforms the 1-second non-adaptive controller by 15% in a sparse system (i.e. 5 cars), but only outperforms the 1-second non-adaptive controller by 3% in a highly saturated system (i.e. ~40 cars).
With this information, we can say that the adaptive controller of traffic lights produces the smallest average traveling time for a car in all forms of traffic, but yet, performs the best in a sparse system.
With this information, we can say that the adaptive controller of traffic lights produces the smallest average traveling time for a car in all forms of traffic, but yet, performs the best in a sparse system.
